The eXperimental Robot Project
Introduction
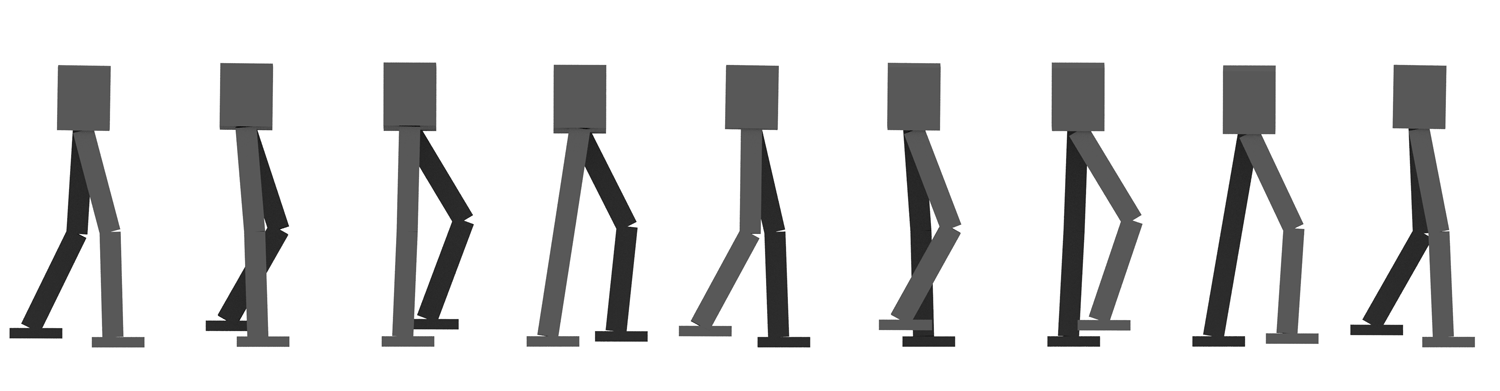
The goal of the eXperimental Robot Project (XRP) is to develop an open-hardware humanoid robot. Right now, the focus is on building a bipedal walking machine - arms and hands will follow (much) later. Read more ...
News
- 2015-01-04 15:49 31c3 talk and slides
- 2014-09-12 19:25 Acrobot progress
- 2014-07-09 21:41 EHSM 2014 slides
- 2014-05-21 21:55 See you at EHSM!
- 2014-05-11 19:19 The Cartwheel controller
Project Blog (Archives, Tags, RSS)
Status
At this time, the project is in the planning phase. Substantial effort has gone into studying walking in simulation. We are currently building an acrobot to explore the application of optimization-based control to real-world systems. Once that is completed, we will start with the production of actual hardware.
We are physically located at Dingfabrik, a hackerspace in Cologne, Germany. We have access to a reasonably complete electronics lab, a Lasersaur laser cutter, an FDM 3D printer, a Deckel FP2 conventional milling machine, and (soon) a lathe.
We are always looking for contributors! If you have experience in a field relevant to the project and would like to contribute, please do not hesitate to contact us.
Contact
We can be contacted at contact@xrpbot.org. There is currently no public (or, indeed, private) mailing list; however, one will be set up once that makes sense.